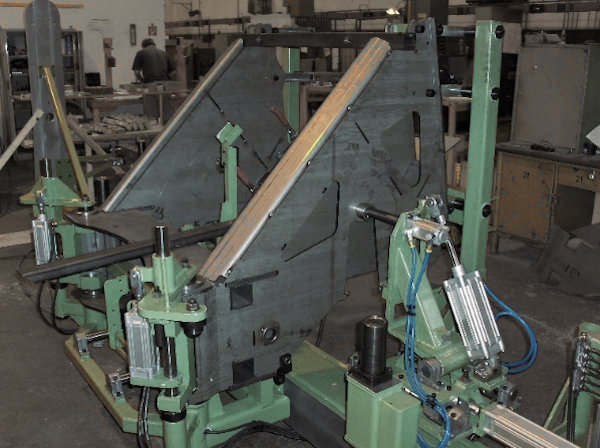
Manual welding
For manufactured parts of lower series, we design and manufacture jigs for manual welding. These are usually clamped in manual or electrical positioners. Our product portfolio includes positions we can deliver according to customer requirements. Depending on the size of the clamped parts, we can clamp with screws, standardized lever clamps or eccentrics.
Robotic welding
Should the manufactured parts be of higher series, we design and manufacture jigs for robotic welding. The jigs can be used with manual or pneumatic clamping. They can be supplied with positioners with robot-operated servo drives for synchronous movement or positioning is PLC-controlled. In automated solutions, the positions of the clamps are detected (whether the clamping is manual or pneumatic) to prevent their possible collision with the welding torch. In the automated welding process, the welding torch paths and the positioning of the part are simulated in the Process Simulate software.

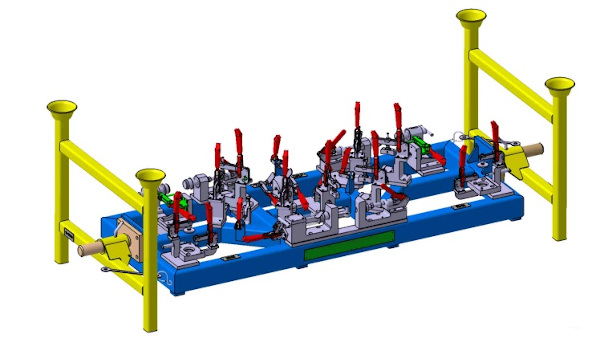
Manual clamping
We use trapezoidal screws, standardized lever clamps or machine clamps for jigs that allow the use of manual clamping elements within the required production cycle. We choose the most suitable clamping elements depending on the required force or dimensional accessibility with the welding torch.


Pneumatic clamping
Depending on the production cycle, the clamping process may be accelerated by using pneumatic clamps or cylinders. Depending on the clamping sequence, the clamps and rollers are included in pneumatic circuits that ensure proper jig functioning. Signals from the cylinder and clamp position sensors, as well as the part presence sensors, are connected to the input-output modules of the valve terminals or decentral I/O modules. Cables and hoses can be protected against burnout with protectors.